(l, b) 面を 80 × 80 グリッドに分け、 輻射強度 I = ∫ds ν を 下の単純な楕円体密度分布 ν(x) を通して計算した。
| ν(x) = (xe yeze)-1exp | [ | - | ( | rc2+x2 | + | y2 | + | z2 | ) | 1/2 | ] | (11) | |
| xe2 | ye2 | ze2 |
ここに rc = 175 pc は計算の分解能にほぼ等しい。太陽 - 原点 (x = 0)線は (x, y) 面に対して角度 θ0 傾いている。また、太陽-原点線 の (x, y) 面への投影線は x-軸と角度 φ0 を成す。|x0 | = 8 kpc を仮定した。輻射強度の積分は s = 2 - 14 kpc で行った。 任意 (l, b) に対する I 値はグリッド点での値を2次元線形近似で得た。
モデル密度
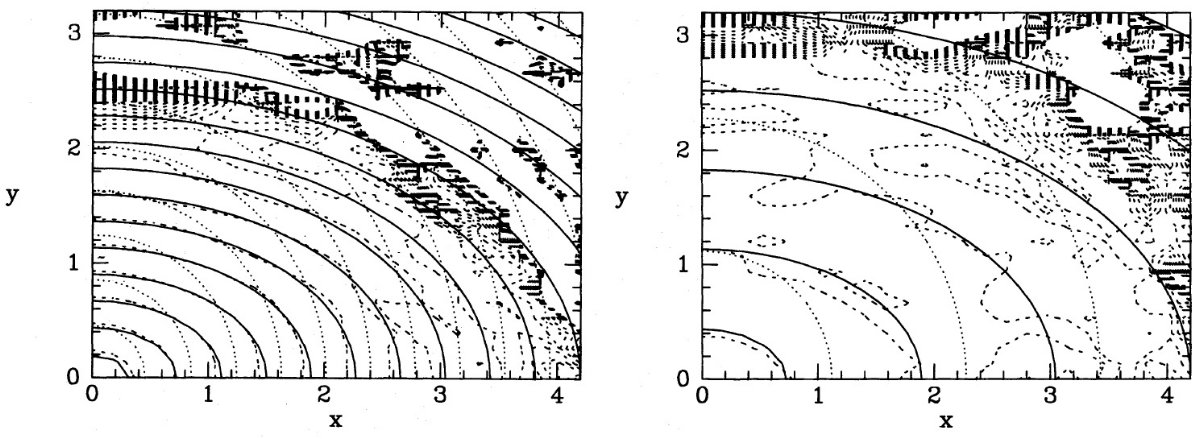
モデル密度は正の8分義区画 xmax = 4.2 kpc, ymax = 3.2 kpc, zmax = 2 kpc を被う、 25×25×10 直交座標 グリッド上で定義される。|x| ≤ xmax, |y| ≤ ymax, |z| ≤ zmax の直方体領域を "boundary box" と呼ぶ。 モデルの方向は一般には、真の分布とは異なる θ, φ を向いている。 ∫ ds ν の積分に使う ν は "boundary box" グリッド点での値を内挿して用いる。 "boundary box" を外れる視線方向に対しては十分小さい値を与えておく。 図1に見られるように "boundary box" の投影は天空上で不規則な形を示す。
実験1
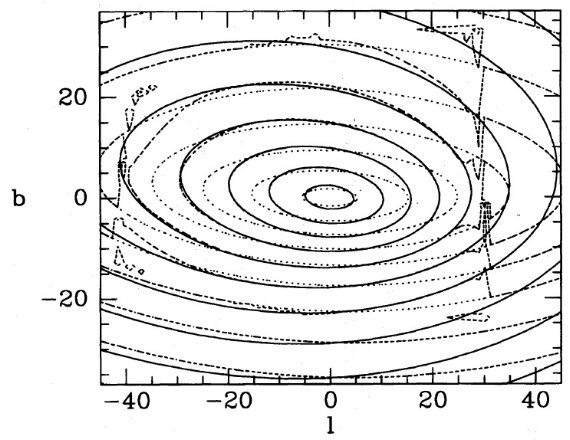
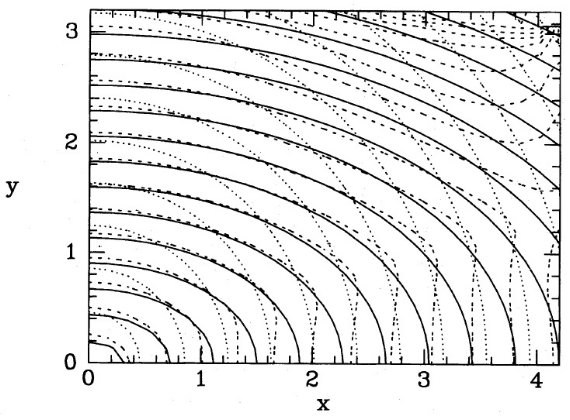
図1は θ0 = θ = 7°, φ0 = φ = 18°, (xe, ye, ze) = (0.5, 0.3, 0.13) kpc でのテスト結果である。実線=真の密度分布。点線=スタート分布。 破線=9次近似解 I9。"boundary box" の縁に I9 の 等高線が集まってきている。その内側では R-L 法で修正が行われ、その外側では 最初の仮定のままである。この不連続転移は初期分布が不適切だった現れである。
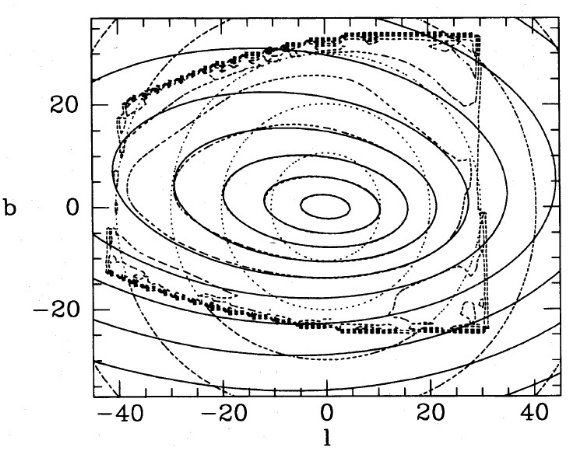
図1.θ0 = .θ = 7°, φ0 = φ = 18° でのテスト。実線=真の密度分布。点線=スタート分布。 破線=9次近似解 I9。 I9 等高線は境界箱シルエットの縁に 集まる。なぜならその外側では I9 = I0 だから。