- Chapter 7 Telescope Structure
- 7.1 Introduction
構造の役割は、
光学系、AO、観測装置を支持
天体を捉えて追尾
気温、湿度の変化、風が吹いても精度を維持
環境に耐える
最小の光量の遮蔽と輻射
架台への要請
主鏡副鏡間のアライメント<0.1mm
セグメント支持部たわみ<100nm
↓
この値は不可能!!→能動制御
- 7.1.1Effects of Gravity Loads
重力による撓みδは
δ=ρgL2/2E=0.5mm
ただし
g=9.8m/s2
ρ=7.8×10^3kg/m3(鉄の密度)
L=50m(典型的な構造物のサイズ)
E=19.3×10^10(鉄のヤング率)
実際はこれの10-100倍
- 7.1.2 Effects of Temperature Changes
温度による変形
δ=LαΔT=1.8mm
ただし
α=1.2×10^-5/℃(鉄の熱膨張率)
ΔT=10℃(温度変化)
L=15m(鏡の半径)
- 7.1.3 Need for Active Control
構造の温度と重力による変位がCELTのように大きく複雑である場合は、もはやセルリエトラスのようなバランスをとる設計は考えない。構造の役割は環境に耐え十分に強いこととなる。そして光学的なずれはアクチュエータに任せる。
- 7.1.4 Telescope Motion Control
駆動トルク∝L^5 (M∝L^3)
固有振動数∝L^-1
- 7.1.5 Geometrical Trade-offs
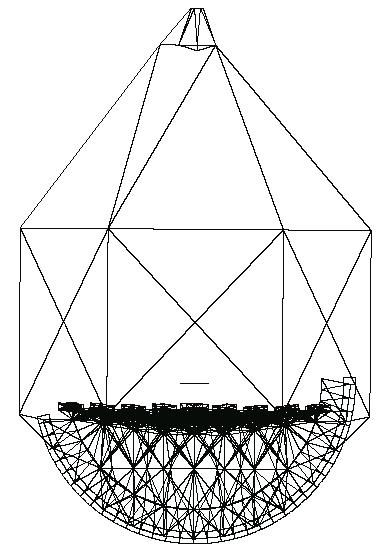
光学系は不変+副鏡と主鏡を結ぶのが鏡筒→鏡筒の長さは決定
鏡筒の重心に高度軸
主鏡Fが速いと得 (ナスミスが主鏡の裏、主鏡を真裏から容易に支持)
主鏡は、後ろの高度軸用ベアリングにつながるトラスが直に支持
副鏡構造物は主鏡セルに接続→センターピース不要
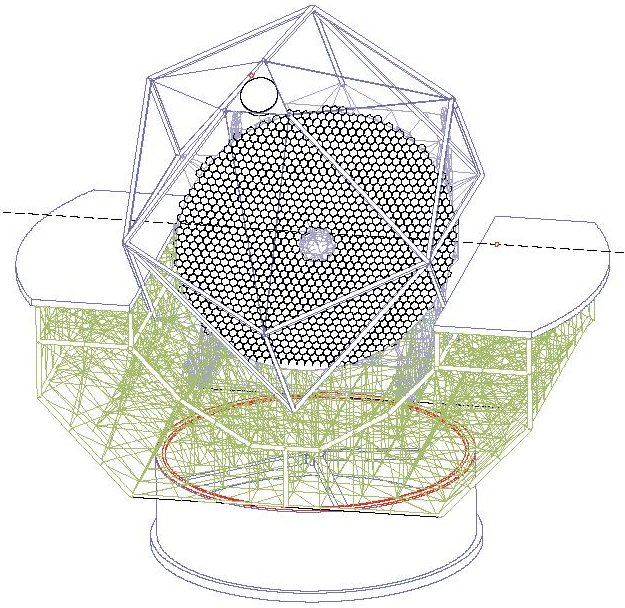
- 7.2 Primary Mirror Cell
主鏡を支え、鏡筒を接続し、ヨークに支えられる構造物
- 7.2.1 General Objectives
変形が滑らか
変形がアクチュエータのストロークを越えない(<2mm)
鏡の脱着が容易であること
制御・熱慣性には軽量のほうがいい
- 7.2.2 Clusters
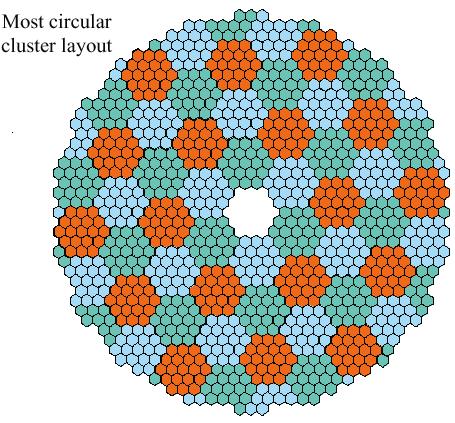
19枚の鏡を1クラスタとしてまとめて取り扱う
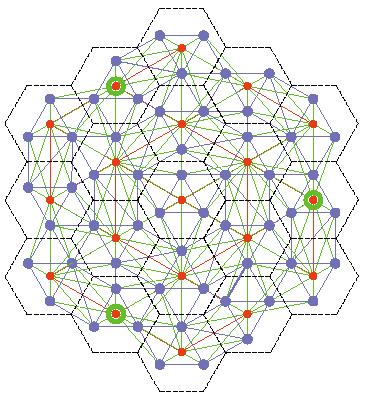
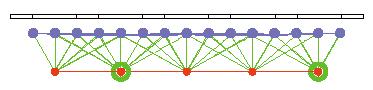
クラスタは2層のトラス構造
クラスタトラスは3点でメイントラスト接続
745kgのクラスタトラスで1560kgの鏡を支持
撓み:0.15mm、固有振動数:30Hz
- 7.2.3 Cell and Subcell Topology
サブセルはクラスタとセグメントを接続
3個のアクチュエータをもつ
重量:8kg
固有振動数:43Hz
- 7.2.4 Cell Dimensions and Performance
円弧状の高度ベアリングがセルを支持
高度軸は主鏡の3.5m前方
天頂角0度から65度での撓み:2.87mm、13.7mm(p-v)
- 7.2.5 Attachment to Elevation Journals
高度軸が巨大な円弧
この円弧でセルをサポート
従来のものと違いたわみが大きい
→いかに固く作るかがキーとなり、ここが本構造のチャレンジングなところとなる
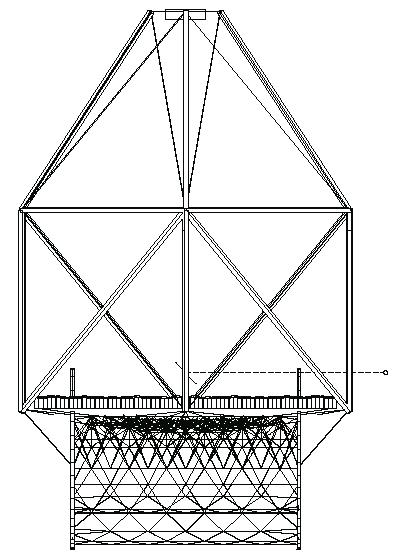
- 7.3 Secondary Support
少ない遮蔽面積で硬い構造を目指す
2層構造 6角柱と6角錐の部分
3本の46cm巾と6本の3.8mm巾のスパイダ
副鏡システム重量10tをサポート
強度:10Hz
- 7.4 Yoke
高度・方位軸ともに静圧軸受け
ヨーク側に3×2つのパッド、セル側が円弧の面
方位軸は4つのパッド
15×32m、耐加重80tのナスミス台を持つ
高度軸まわりの回転を抜いた5自由度は4つのラジアル方向追加パッドで拘束
6つのパッドへの荷重は高度が変化してももそれほど変化しない
方位の回転軸は中心にベアリングをつけて精度を保証する
- 7.5 Telescope Performance
望遠鏡構造でキーとなるのは
硬さ・耐加重・許容変位・駆動
であるが、この中で最も重要なのが重力と風にたいする硬さ
- 7.5.1 Static Deflection Against Gravity
天頂角0度から65度までパッシブサポートで位置精度は不可能
→主鏡・副鏡・第三鏡のアクティブサポート
・光軸方向の変位
ことわり:高度を倒したとき光軸方向とラテラル方向の各セグメントばらばらの変位と傾きの平均だったりP-Vが示されているが、よく分からない・・。ただ、とにかくアクチュエータの稼動範囲である2mm以内に最適化の曲面ができるようにする。
天頂角65度のとき:主鏡は10.7mm、副鏡は15.1mm前に出る
これは事前に計測し補正テーブルをつくりオープンループで補正(1mmの誤差が星像3.09秒角の誤差)
最低固有振動数:1.58Hz
・ラテラル方向の変位
天頂角65度のとき:主鏡は10.7mmずれて、-1.09×10^-3rad回転する
→この法線は副鏡位置と58.1mmずれる
副鏡は83.1mmずれるので、その差は25mm(許容誤差は0.1mm)
アクチュエータがこれを補正
これらの変位は補正テーブルをつくりオープンループで補正
・Relative Tilt
天頂角65度のとき:主鏡は-1.09×10^-3、副鏡は-6.1×10^-4rad回転するので、その差4.8×10^-4radのずれが生じる
→1.02arcsecのこま収差を発生
光学精度のための補正により発生する視野のずれは指向補正
高度軸に対して光軸が20mm移動する。主光線を装置の視野中心からはずさないために第三鏡を0.02/20傾ける。これによる視野端でのデフォーカスは0.04arcsecなので問題ない
さまざまなエラーの超過を避けるためには
能動支持
構造の最適化
光学系の最適化(より小さなセグメントやより主鏡の長焦点)
能動的なWarping harnesses
が機能する
- 7.5.2 Static Deflections Against Wind
風の影響はサイトとドームによる。風はダイナミックなものであるが、静解析も有効である
KECKのドームとほぼ同じになる
- 7.5.3 Dynamics
風や荷重方向の変化、地震などの解析において重要であり、固有値解析は望遠鏡の応答周波数を決める。
共振を避ける設計
固有振動数を高くすることが大切
固有振動数:1.6Hz(高度40度以上で、高度軸面の変位)、1.2Hz(高度65度で、〃)
- 7.6 Pier
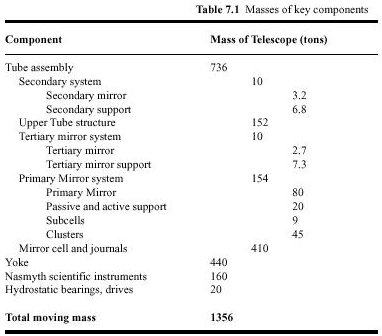
方位軸軸受け半径は16.26m、地上からの高さ1m、全駆動重量1356tを4つのパッドで受ける。ピアの重量は全駆動重量の約10倍の10^4t級
基礎の深さは地質にもよるが約10m、壁の厚さは70cm、中は砂かなんかで詰める。コンクリート重量は3715tで、全重量15000t
鏡筒が水平状態で方位が回転したときのピアへの反力による撓みは0.0012arcsec
天頂から水平を向くときの反力による撓みは0.0029arcsec
- 7.7 Bearings
静圧軸受けを採用
高度軸負荷は736t(開き角50度の場合)、ひとつ当り1.99×10^6N、圧力は1.0×10^7N/m2、パッドの面積は0.2m2
水平軸負荷は1356t(開き角50度の場合)、ひとつ当り3.33×10^6N、圧力は1.0×10^7N/m2、パッドの面積は0.33m2
スルー駆動(方位>1.2°/s、高度>0.22°/sはパッドの速度で0.36m/s、0.064m/sに相当)を満たすためにそれぞれ1.42×10^-4m3/s、2.14×10^-5m3/sのオイルが必要(厚さ50ミクロン)
オイルは7℃に前もってに冷やしておく。熱量は1.6kW
厚さ50ミクロンのオイルのバネ係数は6×10^10N/mで構造体に比べて十分強い。
ヨーク中央の回転軸ベアリングは水平荷重だけを受ける
高度軸のずれは別の静圧軸受けを当てる
- 7.8 Drives and Encoders
ギア駆動が経済的に有効
方位:4×37馬力、高度:4×8馬力のモータが必要
ギア駆動はリップルを招くが、最近の技術の向上により、良いドライバとエンコーダを使用し、モータを対向させて駆動させればヒステリシスやバックラッシュも防げる。
ヘリカルギア(はすば歯車)がSOARでいい結果を出したいる。
方位軸:モータを2組対向させてヨークにつける
高度軸:ギアを内輪側につけて、2組のモータをヨーク側につける
方位軸のエンコーダは中心の軸決めベアリングに置く
高度軸のエンコーダはテープ式を軸受けに貼る。精度は0.0004秒だが変形がリミットするだろう。
おそらくハイデンハイン製
- 7.9 Thermal Response
マウナケアの温度平均-2度〜6度(90%をカバー)は構造に問題ない。
温度分布の問題は今後構造の更なる検討をする。概算では問題ない。
構造体の持つ熱はシーイングを悪化させる。1.5×10^6kgの構造体の熱容量は7.05×10^8J/℃つまり1度の変化で195kW
ドームも同じく3×10^5kg、3×10^8J/℃
外気温との違いを0.5度以内に抑える方法は検討事項
- 7.10 Instrument Changing System
観測焦点ははナスミス焦点のみ
ルーチン的な装置の移動はしない、基本的に常設。
装置へのサービスはその場か実験棟で行う
ナスミスへのエレベータは望遠鏡本体に付けるかどうかは未定
重い装置はクレーンで行う
- 7.11 Segment Handling
まず、鏡の調整は極力(おそらく機械的に)各クラスタ(19枚で1クラスタ)内で行う。
鏡の洗浄はドライアイスクリーニングで(自動化の検討は次のフェイズで)
- 7.12 IR Design Considerations
赤外ではバックグランドの輻射がノイズになるので、まず光路上にあるものを極力減らす。
反射面積に対し隙間の面積は0.9%
- 7.13 Control of Secondary and Tertiary
副鏡サポートは面形状も変える能動支持を検討
第三鏡は能動的に2方向の移動と2方向の回転とlocal y axisの回転(local y axis:意味不明)
副鏡の能動支持は風の外乱とチョッピングのために導入したい。しかし10tを振るのはチャレンジング。(KECKやGEMINIでは1Hz 程度)
- 7.14 Field Rotation and Other Effcts of Alt-Az Mount
経緯台は視野が回転する
経緯台は2軸が別々の動きをし、天頂付近で高速になる